Position normale des os du carpe
successivement en inclinaison radiale,
en position neutre et
en inclinaison ulnaire
Dissociation des os du carpe
Le scaphoïde est en position radiale
Le semi-lunaire est en position ulnaire
Le pyramidal est en position ulnaire

synostose-carpe

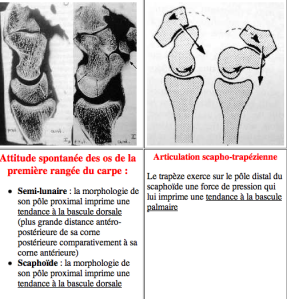
Le carpe est un ensemble fonctionnel poly-articulaire de 8 petits os intercalés entre les 2 os de l’avant bras et les métacarpes. Il doit assurer une grande mobilité pour positionner les doigts dans les différents plans de l’espace mais aussi une grande résistance mécanique lors des mouvements de force.
Les articulations du carpe ont 3 degrés de mobilité : la flexion - extension, la prono - supination, et l’inclinaison cubito - radiale. Les os sont groupés en 3 rangées superposées. Les os de la première rangée sont libres d’attache musculaire hormis le pisiforme qui ne participe pas à la biomécanique du carpe. Cette première rangée est très mobile à l’inverse de la deuxième rangée et des métacarpes qui sont relativement fixes.
L’organisation du carpe présente une géométrie variable qui autorise des mouvements amples alors que la hauteur de la partie médiane du carpe ne change pas. Ces mouvements amples sont permis grâce à une variabilité de la hauteur des bords du carpe lors des mouvements d’inclinaison dans le plan frontal.
Mouvements du scaphoïde :
- En position neutre, le scaphoïde est incliné d’environ 45° par rapport au plan horizontal.
- En inclinaison radiale, il s’horizontalise (30° par rapport au plan horizontal) permettant une diminution de la hauteur du bord radial du carpe.
- En inclinaison cubitale, le scaphoïde se verticalise ( 70° par rapport au plan horizontal) ce qui permet de donner une hauteur maximale au carpe.
Mouvements des os du bord interne du poignet :
Sur le versant cubital du poignet, la hauteur du carpe peut varier grâce au couple formé par le pyramidal et l’os crochu. Selon l’inclinaison, le pyramidal monte et descend le long de la face articulaire supéro - interne de l’os crochu.
Une autre condition au fonctionnement du carpe est le maintien d’une cohérence entre les différents os de la première rangée. Ainsi lors des mouvements d’inclinaison latérale, les 3 os décrivent un mouvement harmonieux de rotation autour d’un centre qui se situe dans la tête du capitate. Cette cohérence est notamment obtenue grâce à l’existence de ligaments interosseux, principalement le ligament scapho-lunaire mais également le ligament luno-triquetral.
Lors des mouvements de flexion-extension, les 3 os se déplacent de façon conjointe même si l’amplitude des mouvements que décrit le scaphoïde est plus importante que celle du semi-lunaire et du triquetrum. C’est la structure même du ligament scapho-lunaire qui permet d’obtenir une solidarité entre le scaphoïde et le semi-lunaire tout en autorisant une amplitude de mouvement plus grande pour le scaphoïde. En effet, ce ligament est plus lâche dans sa partie antérieure qu’en arrière, ce qui autorise un mouvement de translation rotatoire entre ces 2 os autour de la charnière formée par la partie postérieure du ligament.
Le sport consiste à déléguer au corps quelques-unes des vertus les plus fortes de l'âme

Copyright 2012